ドローンや、自動運転車で、空間認識をすることは、とても重要で、複数のシステムを連携させて自身の位置を検出したり、障害物などとの対照的な、位置関係を検出する必要があります。
フォトグラメトリー等、光学カメラを使って、空間認識をするには、莫大な情報量を処理するための計算能力が必要になる。ドローンや自動運転車では、移動スピードが速くなれば、それだけ計算能力が必要になり、リアルタイムに、空間認識を行うことが難しくなってくる。
そこで、注目されているのがレーザーを使ったLidarセンサーだ。Lidarセンサーは、つい最近まで、巨大なセンサーで、値段も高価だったので、なかなか普及しなかった。
Lidarの仕組み
レーザー光を、360度回転するプリズムに当てて、360度に照射し、その反射に要するスピードを図って、障害物との距離を正確に測位する仕組みだ。また、プリズムの角度を変えて、レーザー光の視野を広めて、測位範囲を広げてもいた。 ただし、この仕組みだと、測位頻度が、プリズムの物理的回転スピードに制約されてしまう。
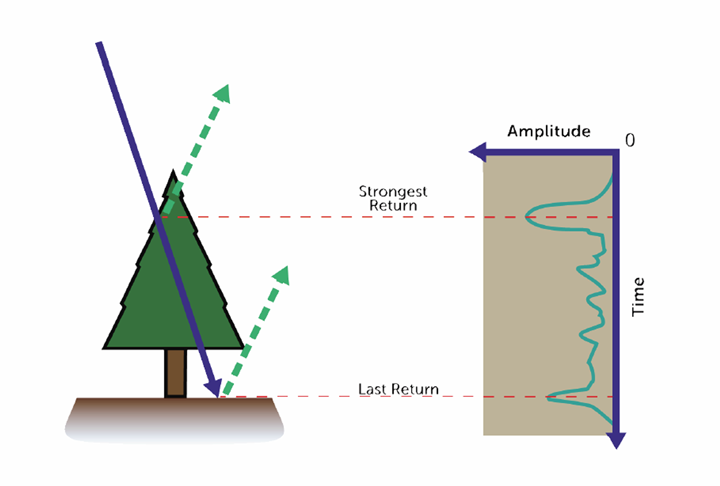
照射したレーザーが返ってくる時間で、位置を検知しているために、検知したポイントは、ポイントの集合体(点群)になる。レーザーの照射密度と測位頻度が低いと、細かったり薄い対象物から、レーザーが反射されないことがある。
しかし、レーザー照射して、反射してきたポイントのx,y,z座標が、直接取得できるために、リアルタイム性に優れており、自動運転車の目に替わるセンサーとして、採用されている。
Lidarの解像度を劇的に上げるには、この回転プリズム機構を別な方法に切り替えるのが合理的だ。最近のLidarセンサーは、回転機構の代わりに、ソリットステート化したセンサーを複数同心円状に配置したセンサーに置き換わり、軽量化、高解像度化した上に値段が大幅に下がり、信頼性が高くなった。すでに高級DSLRカメラ並みの値段になっている。

重さも1kgを切るようになり、ドローンに搭載することが可能となると、フォトグラメトリーのように、時間のかかる重い計算処理が不要で、リアルタイムにポイントクラウド(点群)データが取得可能な点が評価されている。
Lidar測量のメリット
また、ドローンでLidar測量をすると、木の枝や、葉を透過して反射してきたレーザーと直接地表から反射してきたレーザーの差を利用して、樹木を取り除いた本当の地表の形をスキャンできることで、今までわからなかった遺跡の調査などで成果を上げています。
Lidarの弱点
Lidarは、全方向にレーザーを照射しているために、安全性が、規定されていて、特に、裸眼に直接レーザーが入っても害が出ない強度の強さに限定されています。ただし、最近の高感度な、ミラーレスやDSLAカメラでは、直接レーザーを受光すると、イメージセンサーにドット欠けが起こることが確認されています。
Lidar入門

最近では、同じ仕組みのセンサーが、手軽に評価できる値段で入手できることになったことに驚いている。もちろん出力は、とても小さいが。









