ドリフトカーの醍醐味は、タイヤを滑らせながらカウンターステアを当てながら操縦することにありますが、それを実現するために、ほぼグリップしないタイヤを使います。
そのために走行スピードはツーリングカーに比べ、相当遅いものになります。
サスペンションの設定も、いかに、安定してタイヤを地面に設置させトラクションを伝えるかという目的よりも、サスペンションのトラベルが、いかに実車ライクに動くかに重点が置かれます。
ジャイロ制御のサス
実車より軽いモデルを、ブレーキをかけたときに前のサスペンションが沈み込んだり、旋回した時にボディがリアルにロールしたりするためには、模型では慣性モーメントが小さすぎて、その表現は、困難です。いくらバラストを積んでも、車の重心があまりにも地面に近いためによく見れば判別できるかどうか位にしかなりません。
そこで、FPVドローンなどで使われる6DoFジャイロセンサーを使って、4つのサスペンションを能動的に動かすのです。
シンプルモデル
最もシンプルなモデルは、ロボット用高トルクサーボを、ダンパーの代わりに直接搭載し、4輪を直接コントロールすることです。ドリフトカーの走行環境を考えると、サスペンションが完全にソリッド化するわけですが、それほど実害はないようです。皮肉なことに、めちゃくちゃサスペンションが効いているように見えますが。
問題は、25kgのトルクがあるサーボを4つ使うわけですので、電源が問題になります。10AのBecを使うか、サスペンションは別電源にする必要があります。また、トルクが、25kgのサーボを4つ使うわけですから、総合的に100kgのトルクで車体をコントロールすることになります。サーボトラベルを適切に調節しないと、サスペンション機構が自爆します。
ハイブリッドモデル
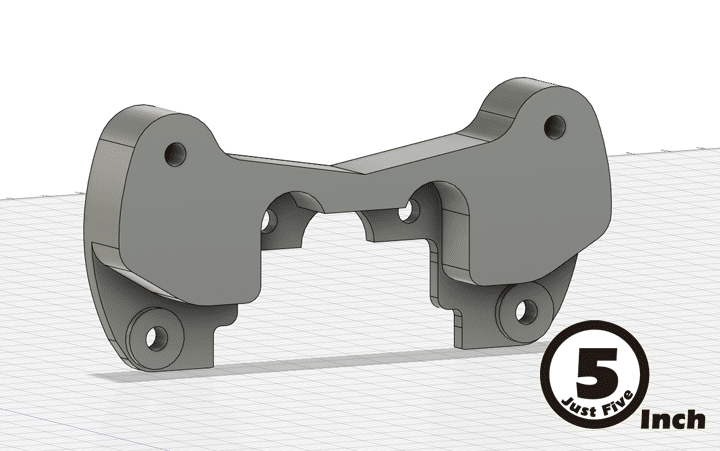
私は、サーボが車高をコントロールする、シンプルモデルと、サスペンションを組み合わせる機構を、新たに作ることにします。簡単に説明すると、ミキシングレバーを介して、サスペンションのストラット固定位置を、可変化し、そこをサーボでコントロールする予定です。
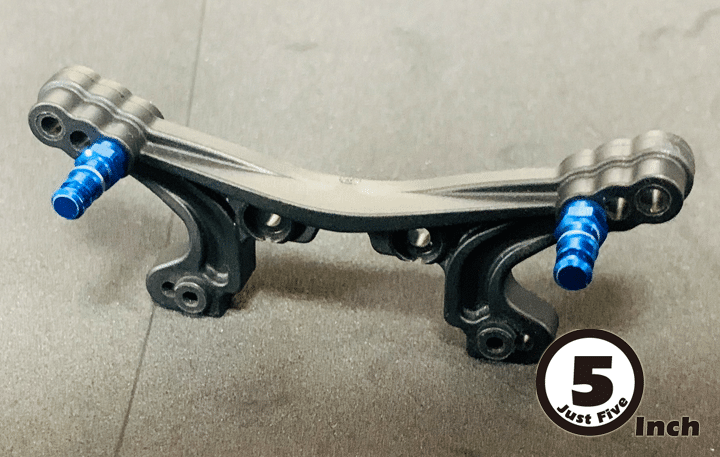
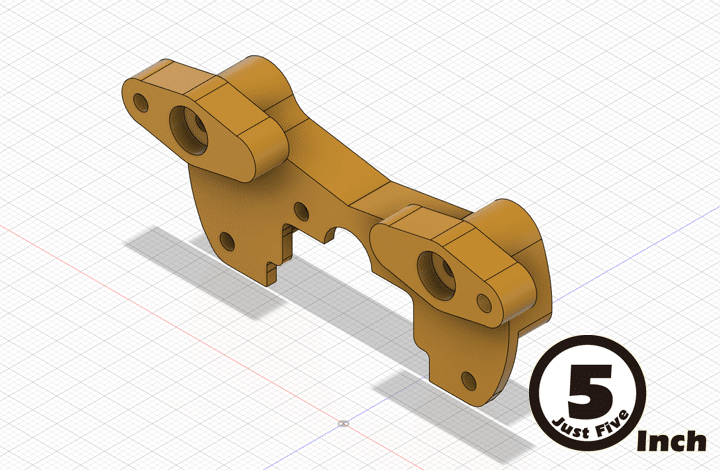
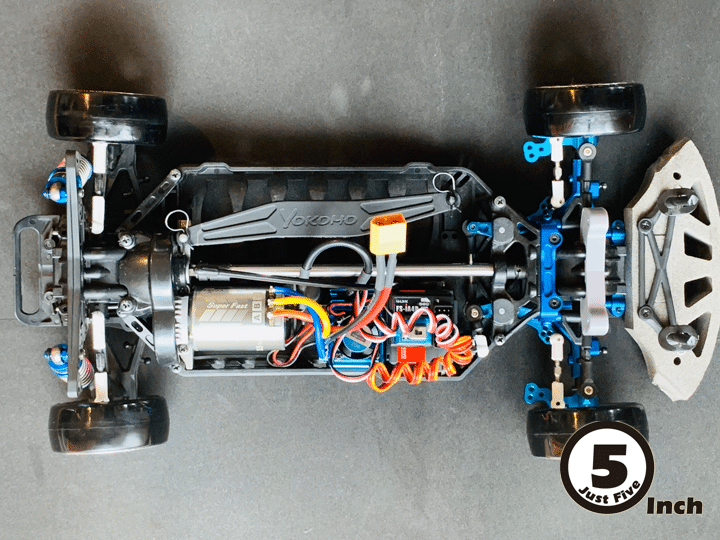
改造に関しては、なるべくオリジナルを生かし、新たなパーツを設計し、アッセンブリー交換することで、アクティブサス化させることを目指しています。
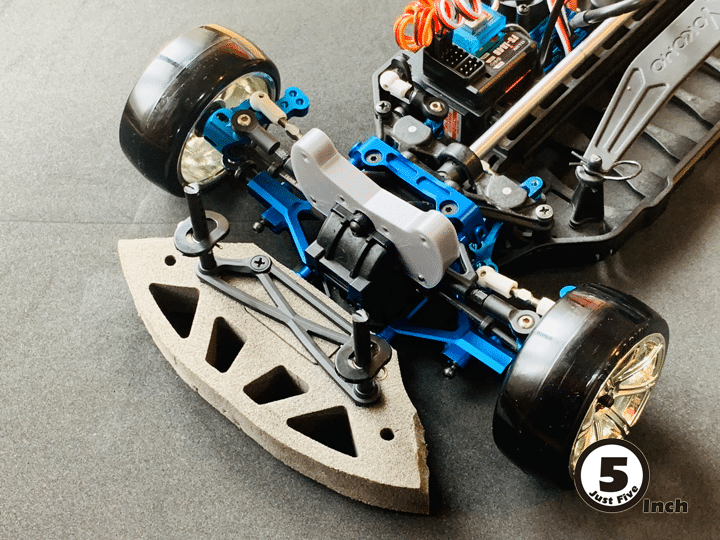
また、ドリフトタイヤは、実写に例えると、超扁平、インチアップホイル仕様になっているので、ホイルも含めて、見直していこうと考えています。
プロジェクトの予定
進捗に応じて、随時公開していく予定ですので、ご意見やご質問もお待ちしております。









