
このサイトは、空モノを中心としたテーマを扱ってきましたが、OpenTXの混乱や、新しい新興メーカーの台頭、そしてコロナ禍での自粛警察の出動などを、目のあたりにし、U200gであっても、嫌な思いをしたくないという気持ちがありました。
そこで、少し趣向を変えて、久々にRCカーで、遊んでみようかというのが、今回のプロジェクトの趣旨であります。
今回のプロジェクトは、1/10スケールで、どれだけ、積極的に実車の挙動を実現さえることができるか?という実験です。
現実の見た目をシミュレートするロボット
今回は、FPVでおなじみの6Dofセンサーを使って、加速時、減速時、ターン時の車の挙動を、わざとらしいくらいに、誇張する、アクティブサスペンションを利用することで、1/10ながらリアルな、1Ton以上の重さがある実車の挙動を演じるロボットを作るということが目的です。
自動車用FC
今回は、FPVドローンで使うジャイロセンサーを使って、車体の挙動をコントロールする、自動車用FCを実際に搭載し、パラメーターでどれくらい、踊り方が変わっていくのかを検証する実証プロジェクトでもあります。
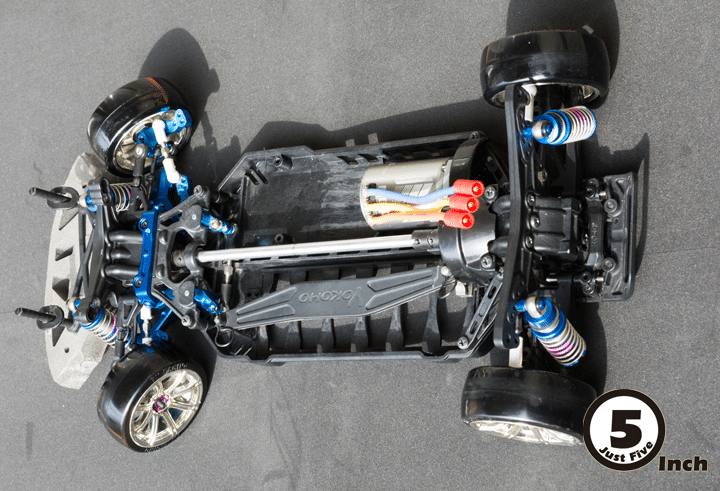
Yokomoドリフトパッケージ
をベース車両に使います。車も、いろいろな細かいレギュレーションが存在するのでしょうが、今回は、それらをすべて無視し、いかにべタな演技ができるロボットにするのか?というのが究極の目標となります。
最近は、YD2シャーシをベースとした2WDシャーシが、人気を博していますが、ジャイロ制御されたフロントステアリングは、IKEAのショッピングカートのキャスターの様な動きが、個人的にはいただけません。
なので、あえてドリフトの基本、AWDのプラットフォームを選択しました。
ドライブ周りは、リアボールデフ、フロントフリーハブのデフ付き。前後のギア比は1.4
程度のケツカキ設定になっています。AWDでもあるので、ステアリングジャイロは使いません。
切れ角アップ済み 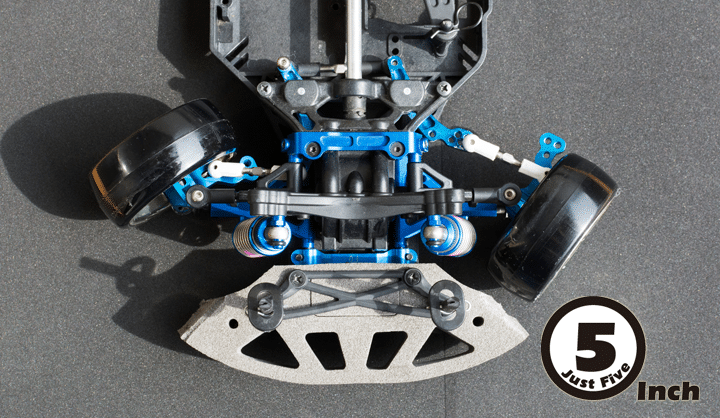
切れ角max
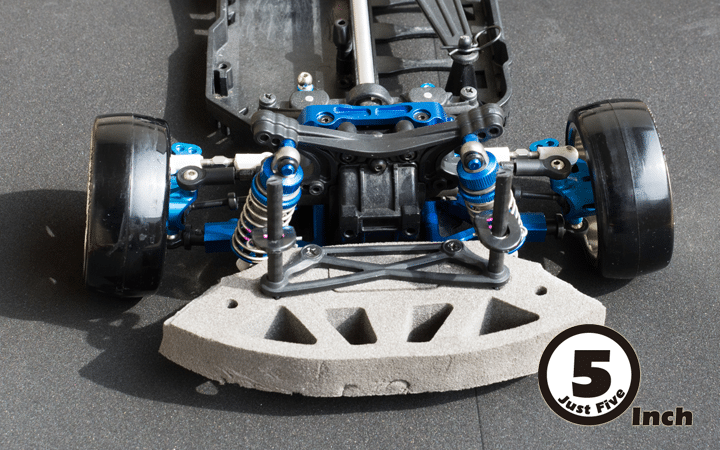
現行のサスペンションを生かしたアクティブサス化
私の現在の目論みでは、現状のサスペンション機構も生かしつつ、加速度の変化によってリアルに踊ってくれるよう、サスペンション4軸すべての動力化を目論んでおります。
また、よりサスペンションの挙動が際立つサイズのホイル、タイヤもオリジナルで作っていこうと考えています。
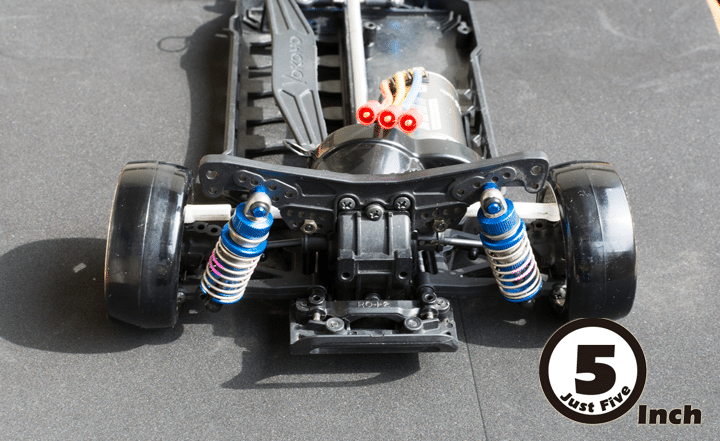
ブラシレスRCカー
私にとっては2代目のブラシレスモーターを用いたRCカーです。もう一台は、ベルトAWDのツーリングカーで、4.5ターンモーターの超スピード仕様ですが、やはり今回のプラットフォームでは、中低速が重要なため、センサー付きのブラシレス13,5Tを使います。
極低速からの滑らかなスピード変化は、リアルさを追求するためにも最も重要な要素なので、センサー付きモーターは必須条件だと考えています。
不定期でこのプロジェクトを随時進めてまいりますので、RCカーもどうぞお楽しみください。









