最近、めっきり飛ばしていない私の5インチ機もぼちぼち、Betaflight4.1xにアップデートしようと思い、作業を開始。しました
ArmattanRooster(アーマタン・ルースター)
ルースターは、昔は何とも思わなかったのですが、カメラケージが、結構ごついです。
この機体を選んだのは、Blheli_32を搭載しているので、ライセンスが不要だからです。FCはMatek405CTRを使っていたので、カレントバージョンをチェックしたところ、Betaflightは4.1.5になっていました。
また、この機体のVTXはTrump互換なので、3inch機で使用していたTBS系のVTXではないので、その辺も、少し、検証したいところです。
まずは、従来の設定をバックアップします。
Diff allコマンドで変更した場所を書き出し、保存したのち、
BL コマンドで、DFU接続します。
新しい、Betaflight4.1.5をインストールし、CLI画面で先ほど書き出した設定を、書き込みます。その後、飛行用バッテリーを接続し、OSDに任意のフォントをアップロードします。
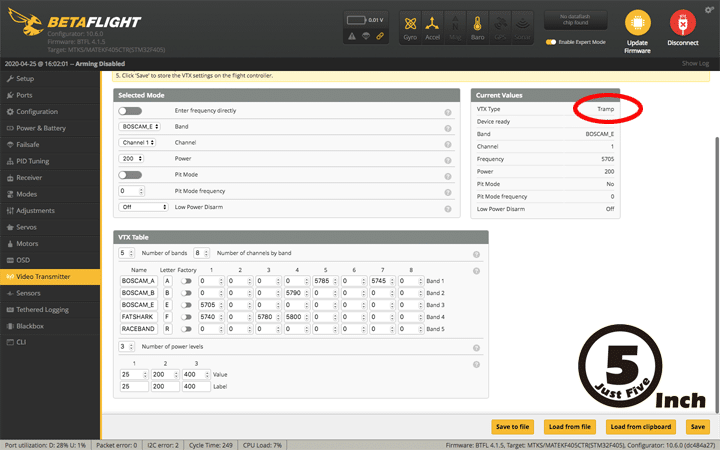
Bf4.1XのVTXテーブル
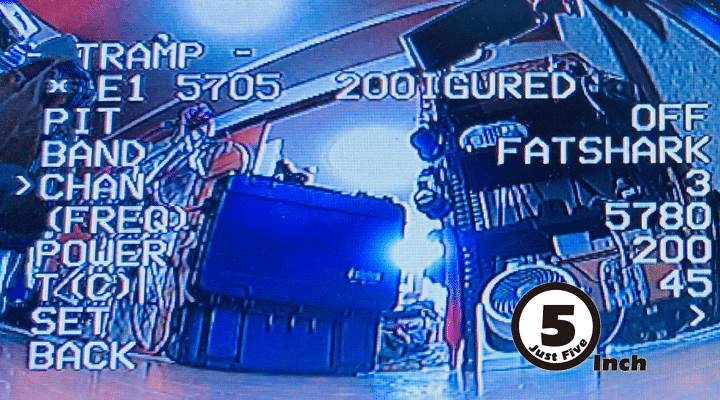
Betaflight4.1Xになってから、VTXの周波数テーブルを、再定義する必要があります。今回は、Trump互換のMatekVtxなので、Trump用のVTXテーブルを読み込みます。
VTXテーブルが必要な場合は、こちらからDLしてください。
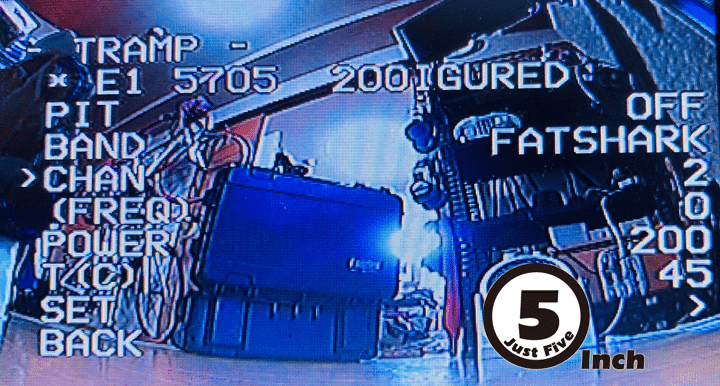
VTXの操作法
VTXの操作方法は、LuaScript経由で設定する場合とOSD経由で設定する場合、若干の違いがありますので、以下をご覧ください。
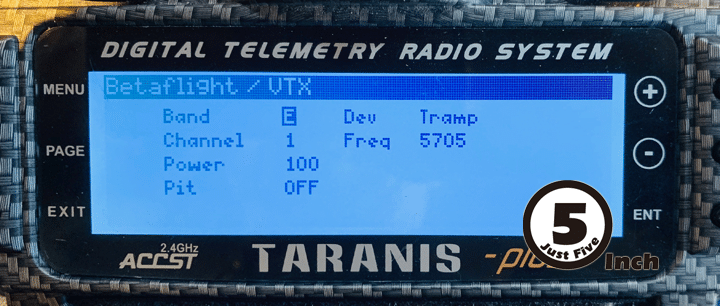
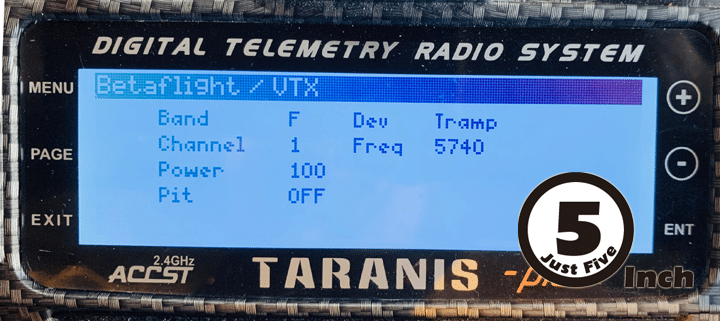
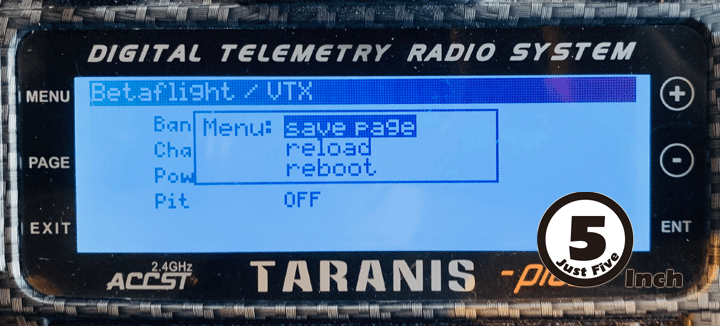
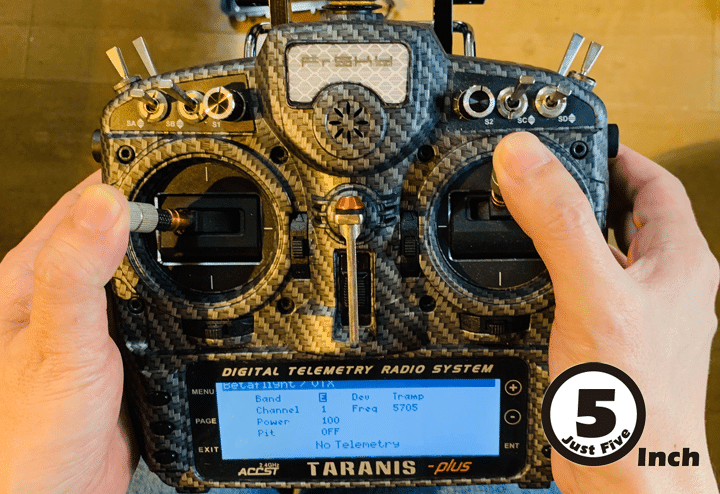
Luaスクリプトを用いる場合
TaranisのBetaflight設定ページで、使用するチャンネルを選択しsaveします。Luascriptからは、工場出荷時のすべての周波数を選べるようになっていますので、間違えた周波数を選択して設定しないようにしてください。
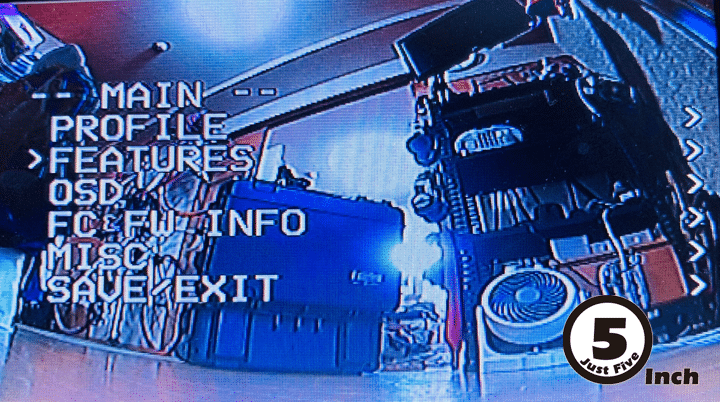
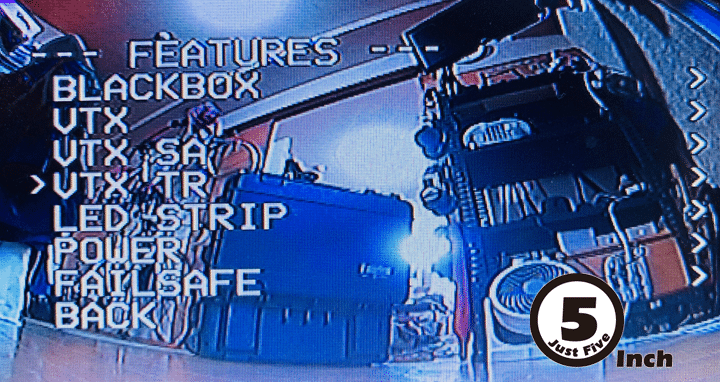
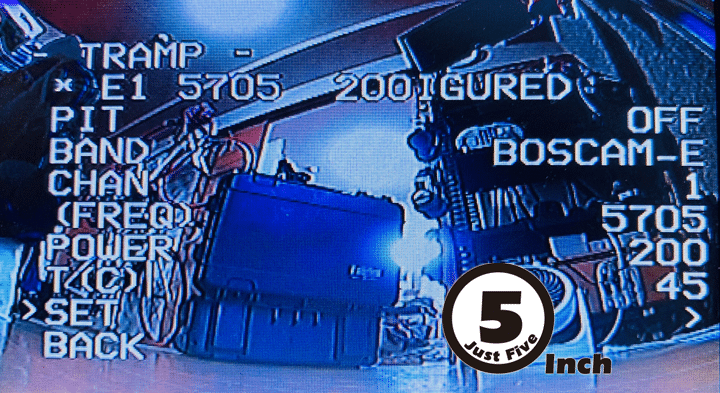
OSD経由で設定する場合
スティックを左は、中立位置から左、右は中立位置で、最大ピッチにすると、OSDメニューが現れます。

Betaflight4.1.5 ArmattanRooster
# version
# Betaflight / STM32F405 (S405) 4.1.5 Mar 16 2020 / 05:19:58 (d4e74e39c) MSP API: 1.42
# manufacturer_id: MTKS board_name: MATEKF405CTR custom defaults: YES
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name MATEKF405CTR
manufacturer_id MTKS
mcu_id 004d00293948500e2034354e
signature
# name: JI1RIN
# feature
feature -SOFTSERIAL
feature -AIRMODE
# serial
serial 2 8192 115200 57600 0 115200
serial 3 32 115200 57600 0 115200
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 1 900 1300 0 0
aux 2 2 1 1300 1700 0 0
aux 3 13 2 1700 2100 0 0
aux 4 28 1 1700 2100 0 0
aux 5 39 0 900 1300 0 0
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A CUSTOM 0 0 0 0 5785 0 5745 0
vtxtable band 2 BOSCAM_B B CUSTOM 0 0 0 5790 0 0 0 0
vtxtable band 3 BOSCAM_E E CUSTOM 5705 0 0 0 0 0 0 0
vtxtable band 4 FATSHARK F CUSTOM 5740 0 5780 5800 0 0 0 0
vtxtable band 5 RACEBAND R CUSTOM 0 0 0 0 0 0 0 0
vtxtable powerlevels 3
vtxtable powervalues 25 200 400
vtxtable powerlabels 25 200 400
# master
set gyro_sync_denom = 2
set dyn_notch_width_percent = 0
set dyn_notch_q = 250
set acc_calibration = 18,105,-247
set rssi_channel = 8
set blackbox_device = NONE
set min_throttle = 1070
set dshot_burst = OFF
set dshot_bidir = ON
set use_unsynced_pwm = OFF
set motor_pwm_protocol = DSHOT300
set motor_pwm_rate = 480
set yaw_motors_reversed = ON
set pid_process_denom = 1
set osd_vbat_pos = 2231
set osd_rssi_pos = 2212
set osd_tim_2_pos = 2455
set osd_flymode_pos = 2147
set osd_throttle_pos = 2274
set osd_crosshairs_pos = 2253
set osd_ah_sbar_pos = 2254
set osd_ah_pos = 2126
set osd_current_pos = 2262
set osd_mah_drawn_pos = 2296
set osd_craft_name_pos = 2442
set osd_altitude_pos = 2103
set osd_disarmed_pos = 2186
set scheduler_optimize_rate = ON
set vtx_band = 3
set vtx_channel = 1
set vtx_power = 2
set vtx_freq = 5705
set vcd_video_system = NTSC
set gyro_1_align_yaw = 2700
set name = yourname
profile 0
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
rateprofile 1
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 0
# save configuration
save
# 








