
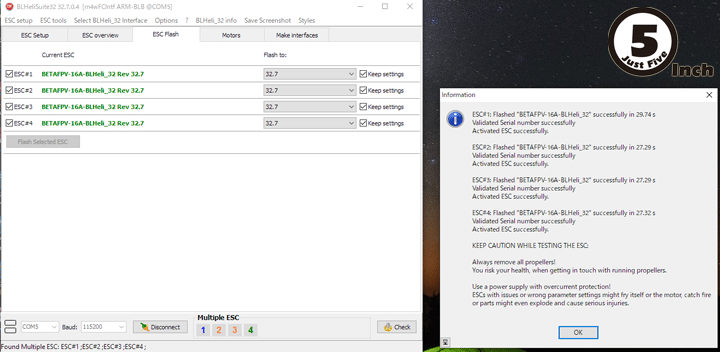
Betaflight4.1は、従来のバージョンを一新し大きな進化をしたという話で、特にRPMfilterが、完全にプロップウオッシュを打ち消すことができるとの評判です。早速、試してみようと思います。新しい機能をフルに使うためには、ESCのファームウェアの更新も必要です。Beta85xは、Blheli_32を採用しているので最新のファームウェアにアップデートすることで bidirectional Dshot を使うことができます
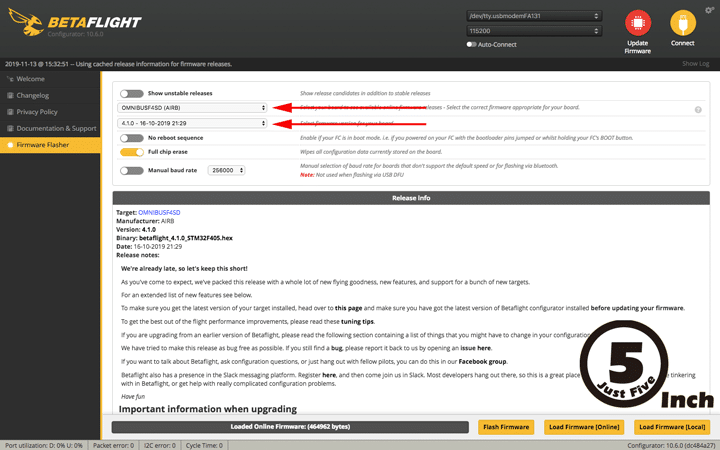
ターゲット
先ず、どのターゲットを選ぶかで、いきなり戸惑いますが、OMNIBUSF4SD(AIRB)を選択します。
デフォルトセッテイング
今回のアップデートで、従来の設定を丸ごと移植することは、推奨されていません。そのため、まっさらの状態を作りたいのですが、レシーバーの設定、OSDの設定などはそのまま移すことができそうです。また、今までは、PMB的な、フライトモードによってレートを切り替える設定をしていたのですが、今回はすべて一新することになります。
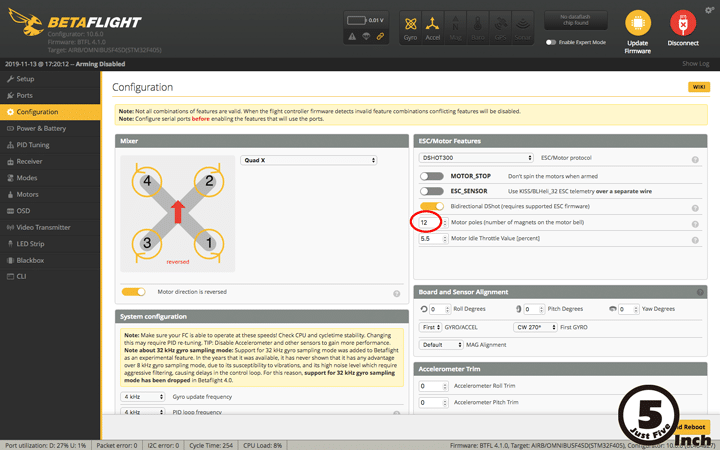
Bidirectional Dshot
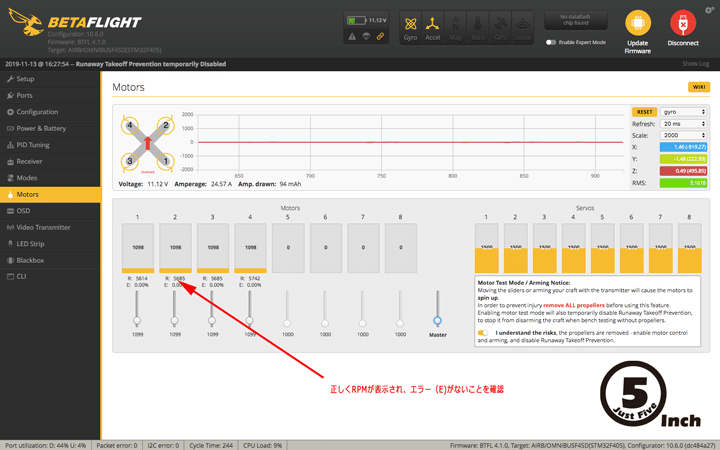
これはすごい進歩です。Quadのモーター毎に、実際の回転数をESCからFCに送り、適切なフィルターをかけてフィードバックします。そのため、従来のDshot1200で行っていた設定と全く違う設定を行います。FCとESCを相互通信させるため、FCのCPU負荷が高くなるので、Pidループは4K,4Kに設定します。
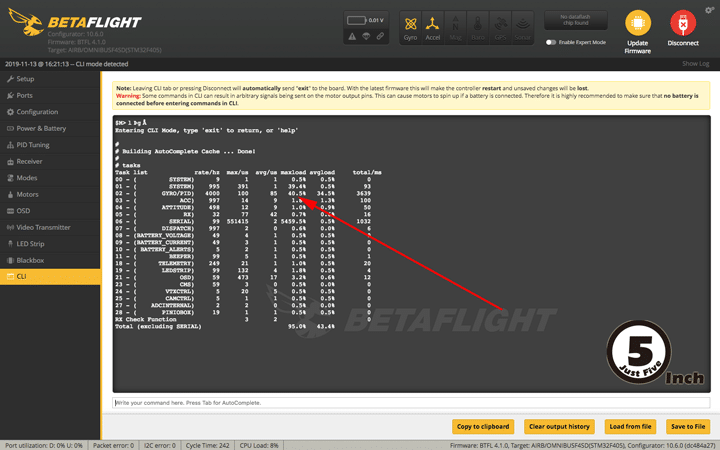
CPU負荷 コマンド”tasks”
4K,4KでDshot300を設定してもF4のFCではかなりの負荷になります。実際にCliで”tasks”コマンドを使って、どれくらいの負荷がかかるかを確認します。少なくとも50%以下に収まるよう設定すべきとのことです。もうそろそろF4では動作が重くなってきた感じです。
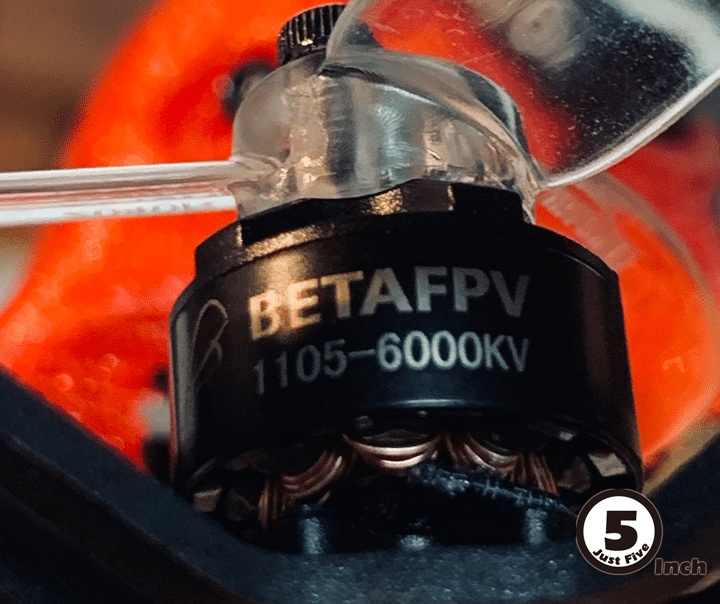
モーター極数の確認
モーターの外側についているマグネットを数え正しい極数を入力します。ずれていると、モーターの脱調や正しく回転数を検出できない原因になります。
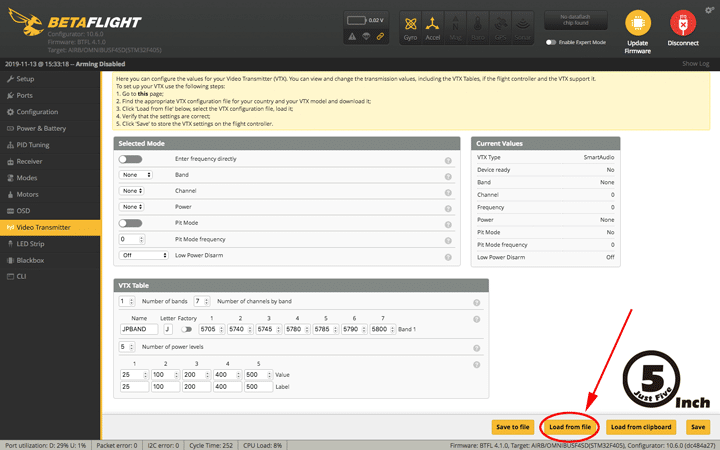
VTX Table
VTXで自分が使う周波数をOSDでテーブルから選択したり、出力を実際のVTXに合わせて設定することができるようになりました。日本で許可されている周波数のみを表示/設定することができるようになりました。
新たにできた新しいVideoTransmitterページから、Jsonファイルで定義された周波数テーブルを直接読み込むことができます。
Jsonファイル
日本で使用できる7周波数を定義したテーブルファイルはこちら
ベース設定
# diff all
# version
# Betaflight / STM32F405 (S405) 4.1.0 Oct 16 2019 / 11:57:16 (c37a7c91a) MSP API: 1.42
# manufacturer_id: AIRB board_name: OMNIBUSF4SD custom defaults: YES
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name OMNIBUSF4SD
manufacturer_id AIRB
mcu_id 0029002f3436470136363438
signature
# name: Beta85XHD
# feature
feature -AIRMODE
feature TELEMETRY
feature LED_STRIP
# serial
serial 0 64 115200 57600 0 115200
serial 5 2048 115200 57600 0 115200
# led
led 0 0,0::A:0
led 1 1,0::A:0
led 2 2,0::L:0
led 3 3,0::L:0
# mode_color
mode_color 6 0 2
# aux
aux 0 0 0 1700 2100 0 0
aux 1 1 1 900 1300 0 0
aux 2 2 1 1300 1700 0 0
aux 3 19 2 1300 1700 0 0
aux 4 28 1 1300 2100 0 0
aux 5 35 2 1700 2100 0 0
# vtxtable
vtxtable bands 1
vtxtable channels 7
vtxtable band 1 JPBAND J CUSTOM 5705 5740 5745 5780 5785 5790 5800
vtxtable powerlevels 5
vtxtable powervalues 25 100 200 400 500
vtxtable powerlabels 25 100 200 400 500
# master
set gyro_sync_denom = 2
set mag_hardware = NONE
set baro_hardware = NONE
set rssi_scale = 200
set serialrx_provider = FPORT
set serialrx_halfduplex = ON
set dshot_bidir = ON
set motor_pwm_protocol = DSHOT300
set motor_poles = 12
set yaw_motors_reversed = ON
set small_angle = 180
set pid_process_denom = 1
set osd_vbat_pos = 2231
set osd_rssi_pos = 2212
set osd_tim_2_pos = 2455
set osd_flymode_pos = 2147
set osd_throttle_pos = 2274
set osd_crosshairs_pos = 2253
set osd_ah_sbar_pos = 2254
set osd_ah_pos = 2126
set osd_current_pos = 2262
set osd_mah_drawn_pos = 2296
set osd_craft_name_pos = 2442
set osd_disarmed_pos = 2186
set vcd_video_system = NTSC
set rcdevice_init_dev_attempts = 4
set gyro_1_align_yaw = 2700
set name = Beta85XHD
profile 0
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
rateprofile 1
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 2
# save configuration
save
# 











